

Тема проекта: Робот планетоход

Автор: педагог дополнительного образования Анопка В.Е.
Каменск Шахтинск 2017.
Содержание:- Цели и задачи проекта.
История луноходов.
Этапы изготовления узлов и сборка робота следующего по линии.
Характеристики и функциональность робота.
Принцип работы.
Детали и материалы.
Инструкция по сборке.
Настройка робота.
Заключение.
Список литературы.
Цели и задачи проекта.
Целью проекта является создание универсального планетохода , который может решать ряд задач в области теории автоматического управления, реализации различных моделей поведения и применения ВЕАМ методов в робототехнике.
Задачи: разработка архитектуры универсального мобильного робота и ее реализация; разработка конструкции робота; разработка систем связи и управления роботом;

История лунохода.
Первый луноход.
«Лунохо́д-1» (Аппарат 8ЕЛ № 203) — первый в мире планетоход, успешно работавший на поверхности другого небесного тела — Луне. Принадлежит к серии советских дистанционно-управляемых самоходных аппаратов «Луноход» для исследования Луны (проект Е-8), проработал на Луне одиннадцать лунных дней (10,5 земных месяцев).
Оборудование
Две телекамеры (одна резервная), четыре панорамных телефотометра;
Рентгеновский флуоресцентный спектрометр РИФМА;
Рентгеновский телескоп РТ-1;
Одометр-пенетрометр ПрОП;
Детектор радиации РВ-2Н;
Лазерный рефлектор ТЛ.
Запуск и эксплуатация
Автоматическая межпланетная станция «Луна-17» с «Луноходом-1» стартовала 10 ноября 1970 года, и 15 ноября «Луна-17» вышла на орбиту искусственного спутника Луны.
17 ноября 1970 года станция благополучно прилунилась в Море Дождей, и «Луноход-1» съехал на лунный грунт.
В течение первых трёх месяцев запланированной работы помимо изучения поверхности аппарат выполнял ещё и прикладную программу, в ходе которой отрабатывал поиск района посадки лунной кабины. После выполнения программы луноход проработал на Луне в три раза больше своего первоначально рассчитанного ресурса (3 месяца). За время нахождения на поверхности Луны «Луноход-1» проехал 10 540 м, обследовав площадь в 80 000 м2, передал на Землю 211 лунных панорам] и 25 тысяч фотографий. Максимальная скорость движения составила 2 км/час. Суммарная длительность активного существования Лунохода составила 301 сутки 06 ч 37 мин. За 157 сеансов с Землёй было выдано 24 820 радиокоманд. Прибор оценки проходимости отработал 537 циклов определения физико-механических свойств поверхностного слоя лунного грунта, в 25 точках проведён его химический анализ
15 сентября 1971 года температура внутри герметичного контейнера лунохода стала падать, так как исчерпался ресурс изотопного источника тепла. 30 сентября аппарат на связь не вышел, и 4 октября все попытки войти с ним в контакт были прекращены.
На «Луноходе-1» был установлен уголковый отражатель, с помощью которого ставились эксперименты по точному определению расстояния до Луны. Отражатель «Лунохода-1» в первые полтора года работы обеспечил порядка 20 наблюдений (первое — 5 декабря 1970 г.), но затем его точное положение утерялось. В марте 2010 года «Луноход-1» был обнаружен исследователями на снимках LRO. 22 апреля 2010 года группа американских учёных из университета Калифорнии в Сан-Диего под руководством Тома Мерфи сообщили, что смогли впервые с 1971 года получить отражение лазерного луча от отражателя «Лунохода-1». Положение «Лунохода-1» на поверхности Луны: Широта: 38,31870°,Долгота: −35.00374°.
Последняя модель лунохода.
«Чанъэ́-3» — китайская автоматическая межпланетная станция для изучения Луны и космического пространства. Межпланетная станция является посадочным аппаратом, состоящим из стационарной лунной станции и первого китайского лунохода. «Чанъэ-3» совершил первую в истории китайской космонавтики (и первую за 37 лет, после советской АМС «Луна-24») мягкую посадку на Луну. Планируемая продолжительность работы лунной станции — один год, лунохода — три месяца.
Запуск аппарата осуществлён 1 декабря 2013 года с космодрома Сичан. Прилунение состоялось 14 декабря в 13:10 UTC (примерно 17:10 MSK).
Разработка
В июне на космодром Сичан был доставлен технический макет для отработки деталей предстартовой подготовки и пуска. В производстве находились две лётные межпланетные станции, одна из которых рассматривалась как резервная на случай неудачи первой, но в случае успеха может быть запущена с расширенной программой.
«Чанъэ-3» является частью китайской программы по изучению Луны с помощью автоматических межпланетных станций. Спутники Луны «Чанъэ-1» и «Чанъэ-2», собрали достаточно информации для создания новой, наиболее точной трёхмерной карты лунной поверхности. Посадочные аппараты «Чанъэ-3» и «Чанъэ-4» предназначены для обследование наиболее интересных участков поверхности. Космический аппарат «Чанъэ-5» предназначен для доставки образцов лунного грунта на Землю. Предполагается собрать до 2 кг образцов лунных пород. Запуск в 2017 году.
Вся программа должна быть завершена к 2020 году.
Характеристики
Автоматическая межпланетная станция «Чанъэ-3» является посадочного аппаратом на котором установлены приборы и оборудование стационарной лунной станции и луноход. Посадочный аппарат снабжен четырьмя опорами, двумя панелями солнечных батарей и платформой со сходнями, которая играет роль своеобразного лифта. Луноход (ровер) доставляется на Луну на верхней плоскости посадочного аппарата. С неё он выезжает на платформу-лифт, которая, опустившись из верхнего положения в нижнее, позволяет луноходу съехать на грунт.
На посадочном аппарате размещаются три панорамные камеры и устройство для изучения лунного грунта. Имеется отдельная телекамера для съёмки поверхности во время спуска, зависания посадочного аппарата продолжительностью до 100 секунд и выбора окончательной точки прилунения.
Луноход
6-колёсный луноход «Юйту», массой 140 кг,может развивать скорость до 200 метров в час. Луноход, питающийся от двух панелей солнечных батарей, оснащён двумя парами камер (навигационные и панорамные), альфа-рентгеновским и инфракрасным спектрометрами, чувствительные элементы которых размещены на манипуляторе. Кроме того, на его донной части смонтирован радиолокатор, позволяющий изучать структуру грунта до глубины порядка 30 м и коры Луны до отметки в несколько сотен метров.
Луноход получил имя персонажа китайской мифологии Юйту (кит. 玉兔 — Лунный заяц, Нефритовый заяц). Это название было выбрано по результатам интернет-голосования.
Посадочный аппарат
Масса посадочного аппарата после прилунения — 1200 кг.
Посадочный аппарат несёт камеру коротковолнового УФ-диапазона, предназначенную для наблюдения земной ионосферы в полосе 30,4 нм в интересах исследования космической «погоды», солнечной активности, состояния магнитного поля Земли и потоков частиц в ионосфере. На нём будет также установлен оптический телескоп ближнего УФ-диапазона для астрономических наблюдений, объектами которых будут двойные звезды, короткопериодические переменные, активные ядра галактик и другие объекты
Особенности миссии
В задачи «Чанъэ-3» входит зондирование рельефа и геологического строения Луны, изучение полезных ископаемых и наблюдение земной ионосферы с поверхности Луны.
В ходе выполнения программы «Чанъэ-3» на Луну впервые доставлен телескоп. Он предназначен для исследования ближнего ультрафиолетового излучения. Луноход впервые будет оснащен 360-градусным панорамным фотоаппаратом, инфракрасным и альфа-рентгеновским спектрометрами и радиолокатором, позволяющим изучить геологическую структуру Луны до глубины порядка 100 метров.
Посадка
Посадка на лунную поверхность была намечена на 16 декабря 2013 года, в кратере Залив Радуги Моря Дождей (рядом с местом посадки советского «Лунохода-1» в 1970 году), но состоялась 14 декабря и на 400 километров восточнее.
Описание планетохода
Планетоход «MARK» (Mobile Autonomous Robot system Kinect.) Мобильный автономный робот системы Kinect (управление инфракрасным светом), способен объезжать препятствия, и не бояться упасть в пропасть, передвигаться по намеченному маршруту.
Спереди и сзади корпуса, по его углам расположены оптические датчики (Рис 6). Которые определяют расположение препятствия (левый, правый), расстояние до препятствия. Внизу установлены датчики поверхности планеты (Рис 8), для определения препятствия на поверхности и места положения робота на маршруте.
Все команды с датчиков поступают на блок обработки сигналов (Рис 2). Блок обработки сигналов анализирует сигналы и отправляет соответствующие команды на блок драйверов (Рис 4), и команды на Землю, которые управляют исполнительными механизмами, двигателями. Робот совершает маневр, в зависимости от расположения препятствия, и объезжает его. На рисунке 1 показаны расположения основных блоков робота.
Схемы планетохода MARK показаны на рисунках и очень просты. В отличие от микроконтроллерного оригинала на планетоходе установлены дополнительные датчики, которые, при использовании микросхемы , заставляют робота послушно останавливаться. В этом исполнении третий датчик направлен вертикально вверх. Если микросхему К561ЛЕ5 заменить на К561ЛА7, а третий датчик направить вниз и под небольшим углом вперед, робот сможет ездить по луне, не опасаясь падения в кратеры.
В отсутствие препятствия оба мотора вращаются, робот едет вперед. Появление препятствия перед датчиком вызывает смену полярности питания мотора (смену направления вращения). Например, при встрече препятствия впереди слева, правый мотор станет тянуть робота назад, а левый будет продолжать двигать его вперед. В результате робот будет поворачивать вправо до тех пор, пока препятствие слева не выйдет из поля зрения левого датчика. Затем, прямолинейное движение возобновится. Аналогично при появлении препятствия справа, но поворот будет влево. По такому же принципу работают и датчики поверхности планеты .
Корпус для робота изготовлен из жести способом пайки, а можно использовать любую детскую игрушку, учитывая, что механика построена по танковой схеме (два двигателя). Робот питается от батареек или аккумуляторов напряжением 6…9 вольт.

Рис. 1.Расположение на роботе основных блоков
Принцип работы.
В состав робота входят следующие блоки:
Блоки датчиков препятствий.
Блок обработки сигналов с датчиков.
Блок драйверов для двигателей.
Блок датчиков поверхности планеты.
Блок передачи информации в центр управления.
Блок питания (солнечная батарея).
Блок взятия и анализа грунта планеты.
При включении робота выключателем S1 на выходах DD1 присутствуют: вывод 3- ноль, вывод 4- единица, вывод 11- ноль, вывод 10- единица. Робот движется вперед.
Предположим, препятствие было слева, отраженный ИК-сигнал принимает левый фотоприемник D1. В этом случае происходит быстрая зарядка конденсаторов С3 и С5. На входах D1.1 и D1.2 возникают уровни логического нуля, а на выходах будут единицы. В модуле драйвера транзисторы VT3, VT6, VT9, VT12 закрываются, но открываются VT4, VT, VT10, VT11 и полярность питания электродвигателей М1 и М2 меняется на обратную, робот отъезжает назад. Но, постоянная времени цепи R3-C3 больше чем R5-C5, поэтому, реверсивное движение колес, работающей от двигателя М2 прекращается раньше и включается прямое её движение, в то время, как вторая половина (М1) все еще движется в реверсивном направлении. В результате планетоход не только отъезжает назад, но и разворачивается направо. Затем, после разрядки С3 через R3 прямолинейное движение возобновляется (до встречи с другим препятствием).
Если на препятствие наталкивается фотоприемником D2, то все происходит точно так же, но работают цепи R4-C4 и R6-C6. В результате, планетоход так же отъезжает назад, но поворачивает теперь налево.
Приемники D5 и D6 можно бы и не устанавливать, но они нужны на случай, если робот отъезжая назад наткнется на препятствие, расположенное позади. В этом случае, на остаток времени реверсивного движения один или оба двигателя выключатся. Затем, включится прямолинейное движение
Если датчики D5 и D6 не установить, то упершись в препятствие, позади робот будет буксовать. В том случае, если планетоход наезжает на расположенное впереди препятствие и происходит срабатывание обеих фотодатчиков, в идеале, планетоход должен отъехать прямолинейно назад и ударится снова в это препятствие. Но, чтобы этого не происходило, нужно временные параметры цепей R3-C3 и R5-C5 установить немного разными. Тогда робот сначала отъезжает назад, а затем поворачивается в сторону датчика с большей задержкой. Направление обратного движения будет уже другим, и робот сможет обойти препятствие, либо толкнется в него одним датчиком и обойдет препятствие за несколько приемов. Резисторы R3, R4, R5, R6 выбраны одинаковыми, с их помощью нужно установить выдержки времени движения планетохода так, чтобы она оптимально обходила препятствия. Их параметры сильно зависят от скорости движения планетохода и подбираются экспериментально. Можно руководствоваться такими соотношениями, что постоянная времени R3-C3 должна быть примерно в два раза больше R5-C5, а постоянная времени R4-C4 примерно в два раза больше R6-C6, но постоянные времени R3-C3 и R5-C5 должны отличаться, примерно, на 20%.
Блок обработки сигнала.
На рисунке 2 показана схема модуля обработки сигнала (BOC). На элементах D1.1 и D1.2 выполнены времязадающие цепи. Сигналы управления должны быть «ноль» Микросхему К561ЛА7 можно заменить зарубежным аналогом CD4011A.
На рисунке 3, печатная и монтажная платы.

Рис.2


Рис.3
Блок драйвера для двигателей.
На рисунке 4 показана схема блока управлением двигателями, драйвер (DRV). Транзисторы в блоке С8550 и С8050 можно заменить транзисторами КТ814 и КТ815 соответственно. Транзисторы С945 на КТ3102. Стабилизатор DA1-7805, на отечественный КР142ЕН5. Конденсаторы С1 и С2 устанавливаются на двигателях.
В настройке блок не нуждается. На рисунке 5, печатная и монтажная платы.
 Рис. 4
Рис. 4

 Рис. 5
Рис. 5
Блок датчика препятствий.
На рисунке 6 показана схема датчика препятствий, D1 и D2 – передние и D3, D4- задние. Импульсы частотой 10…12 кГц вырабатываются генератором на микросхеме DA1, построенный на таймере NE555. Резистором R5 регулируют дальность обнаружения препятствия, резистором R1 – частоту импульсов, R6 - чувствительность.
В качестве приемника отраженного сигнала служит фототранзистор FT1. Вместе с микросхемой DA2 они образуют усилитель импульсов. Диоды VD1-VD2 преобразуют импульсы в логический сигнал, единица-ноль. При появлении препятствия на выходе датчика – ноль, при отсутствии препятствия на выходе датчика – единица.
Для защиты от помех датчик нужно поместить в металлический корпус, и закрыть темным стеклом. На рисунке 7 показаны печатная и монтажная платы.
 Рис. 6
Рис. 6

 Рис. 7
Рис. 7
Блок датчика поверхности планеты.
На рисунке 8 схема датчика пола. Датчик поверхности планеты построен на сдвоенном компараторе DA1 марки LM393. Резистором R3 и R7 настраивают порог срабатывания компаратора, а точность (яркость ик-диодов HL1-HL2) резисторами R1 и R5. На выходах 1 и 7 микросхемы DA1 при отсутствии пропасти (отраженный от пола сигнал) – единица, а когда есть пропасть (не отражается от пола сигнал) – ноль. На рисунке 9 показаны печатная и монтажная платы.

Рис. 8


Рис. 9
Блок регулятора хода.
На логических элементах DD1.1 и DD1.2 микросхемы выполнен генератор с регулируемой скважностью импульсов. Скважностью импульсов называется отношение периода следования импульсов к их длительности и обозначается буквой S"" S=T/t. Регулировка осуществляется подстроечным резистором R1. Вращая ручку подстроечного резистора R1 можно изменять длительность выходного импульса, в значительных пределах увеличивая или уменьшая, таким образом, число оборотов двигателя M1. Перемещение ручки подстроечного резистора R1 влево по схеме, уменьшает ширину импульса на выходе генератора. А перемещение ручки подстроечного резистора R1 вправо увеличивает ширину выходного импульса.



Ч
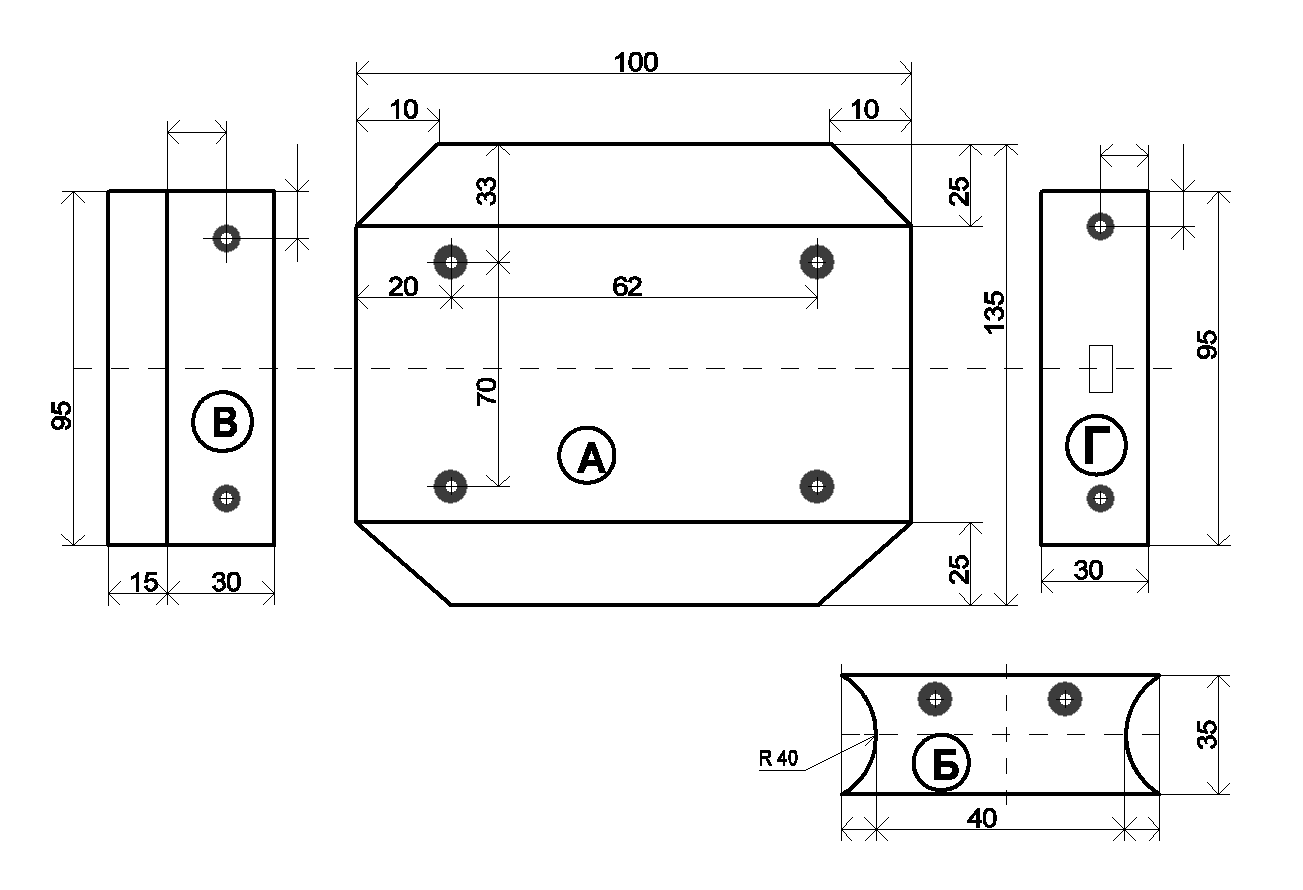
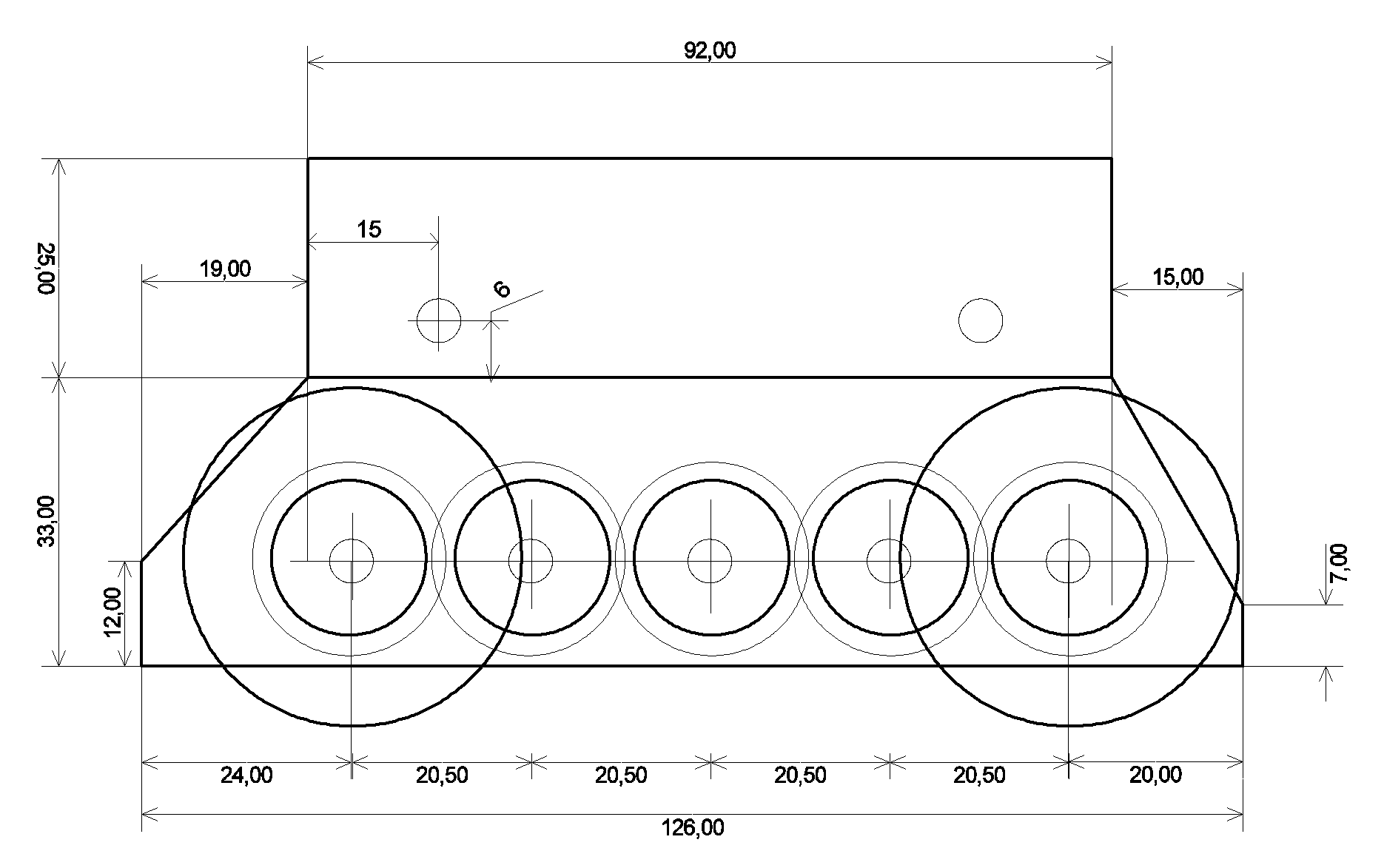 ертеж основной рамы и ходовой части робота.
ертеж основной рамы и ходовой части робота.Чертеж редукторов робота.

 ертеж основной рамы и ходовой части робота.
ертеж основной рамы и ходовой части робота. 

Литература:
Создание роботов в домашних условиях. Ньютон С. Брага., М., НТ. Пресс 2007.
500 схем для радиолюбителей. Электронные датчики. А.П. Кашкаров Наука и Техника. 2008.
«Робот-жук». Р.Аношин. Радиодело №3 2006
www.http://robozone.su робототехника
www.http://alldatasheet.com/ электронный справочник
www.http://radionet.com.ru радиосхемы
Приложение.
Расположение выводов для радиодеталей.















17




